
什么是点云任务 (PCT)?——指对点云、栅格和/或矢量进行操作的函数(如提取地面、合并线)。任务可以是过滤器和/或提取器。过滤器对点的分类值进行分类或更改(例如分类地面)。提取器将点云数据中的信息提取到矢量、图像或信息文件中(例如点云统计)。点云任务可在 Arcmap(使用 LP360 for ArcGIS 扩展模块时)或 LP360 中目录的点云任务选项卡上访问。LP360 v2018.2 引入了点云任务管理器。
点云任务选项

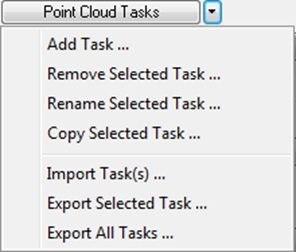
添加新任务
将新 PCT 添加到当前任务列表(程序安装了六个默认任务)
- 选择点云任务选项卡
- 在点云任务下拉菜单下选择添加任务
- 指定您尝试添加的任务类型并为任务提供唯一名称
- 单击确定后,任务现在已添加到点云任务列表中
删除任务
从当前任务列表中删除任务
- 选择点云任务选项卡
- 从任务列表中选择一个 PCT
- 在点云任务下拉菜单下选择删除选定任务…
重命名任务
重命名选定的任务
- 选择点云任务选项卡
- 选择点云任务选项卡
- 在点云任务下拉菜单下选择重命名选定任务…
拷贝任务
复制所选任务
- 选择点云任务选项卡
- 从任务列表中选择一个 PCT
- 在点云任务下拉菜单中选择复制选定任务…
- 为复制的任务提供唯一名称
导入任务
仅以 XML 格式导出任务列表中当前选择的任务
- 选择点云任务选项卡
- 从任务列表中选择一个 PCT
- 在点云任务下拉菜单中选择导出选定任务…
- 将导出的任务另存为 XML 文件
导出所有任务
以 XML 格式导出任务列表中的所有任务
- 选择点云任务选项卡
- 在点云任务下拉菜单中选择导出所有任务…
- 将导出的任务另存为 XML 文件
执行点云任务
所有点云任务设置都在点云任务选项卡上修改,并使用应用按钮保存。为了执行活动任务(显示在点云任务选项卡中的任务),必须使用点云任务工具栏上的执行工具之一。

可用的点云任务类型 (v2021.1.47.0)
(SA) 旁边的点云任务类型表示不适用于 LP360 for ArcMap 扩展。
| 点云任务类型 | 许可要求 | 引入版本 | 描述 |
| Adaptive TIN Ground Filter (自适应 TIN 接地滤波器) | 高级版 无人机版 | v2011.1 | 根据自适应 TIN 地面分类算法对点进行分类。主要用于地面点的分类,过滤器中有多个参数,尤其是在使用高级选项时。 |
| Affine Transform LAS (仿射变换 LAS) | 高级版 无人机版 | v2020.1 | 使用仿射变换重新投影 LAS 数据(平移、缩放、旋转或矩阵计算),该任务是用于修改点云坐标的多功能工具。常用于将点云改正到地面(需要一系列已知控制点计算出转换参数) |
| Attribute Editor (SA) (属性编辑器) | 标准版 无人机版 | v2015.1 | 为要素设置属性值 |
| Basic Filter (基本过滤器) | 标准版 无人机版 | 基本过滤点云任务允许您定义一个或多个点过滤器并将匹配点过滤器的一组点云分配给一个分类。该 PCT 可用于在 LIDAR 项目中对点数据进行简单的重新分类。 | |
| Classify by Feature (按要素分类) | 标准版 无人机版 | v2014.1 | 按要素分类是使用跟其他要素空间关系为点分配分类的有用方法 。地图中存在的任何矢量图层都可用多种空间关系对点进行分类:在多边形、线性或点要素指定距离内或完全在多边形内等等。 |
| Classify by Statistics (按统计分类) | 标准版 无人机版 | v2015.1 | 它一般主要用于数据抽稀(data thinning) – 特别适用于非常密集的数据,例如从图像派生的数据(密集图像匹配)。这是精简密集数据集的一种非常好的方法。 |
| Cluster by Distance (按距离聚类) | 高级版 | v2022.1.9.0 | 使用欧几里得距离规则对点进行聚类,并使用额外的字节对其进行编码。 |
| Color by Image (按图像着色) | 标准版 无人机版 | v2021.1.47.0 | 从地理参考图像中着色 LIDAR 点(三或四波段正射镶嵌) |
| Conflation | 标准版 无人机版 | v2013.2 | 计算几何图形的 Z 值 Conflation任务定义了一组用于数字化要素并从 LIDAR 表面提取高程的过程。可以将Conflation任务配置为数字化点、折线和/或多边形要素。 |
| Cross Sections (路径横断面生成) | 标准版 无人机版 | v2014.1 | 为给定的路径生成横截面轮廓。 与体积相关的分析的一个重要元素是横截面的生成。此横截面工具允许将特征指定为“对齐”路径,定义沿对齐的横截面间距(例如每 5 米)和每个横截面的长度。 |
| Draw Shape Features (SA) (绘制形状要素) | 标准版 无人机版 | v2015.1 | 绘制形状(shape)要素 |
| Duplicate Points Classifier (重复点分类器) | 标准版 无人机版 | v2018.2 | 识别和分类重复点 |
| Geocode True View LIDAR Task (SA) (地理编码 True View LIDAR 任务) | True View EVO LP360 Drone | v2020.1 | 从 GeoCue True View 3DIS 的原始激光雷达文件生成 LAS 文件 |
| Grid Generator (SA) (网格生成器) | 基础版 无人机版 | v2017.1 | 此任务根据输入参数生成单元格网格 |
| Ground CleanUp Filter (SA) (地面清理过滤器) | 标准版 无人机版 | v2015.1 | 自适应 TIN 地面滤波器旨在根据 LIDAR 数据对地表进行分类。根据分类过程中使用的参数以及 LIDAR 本身,可能会有一些地表没有最终被分类。通常具有高度变化剧烈的特征。缺少地面分类的一些常见示例包括:土堤、悬崖边/顶部、山顶、高架路面。 |
| Height Filter (高度过滤器) | 标准版 无人机版 | 高度过滤点云任务用于对与定义的表面(例如地面)垂直距离的点进行分类。该过滤器可用于将点从地面分类为垂直地层,然后可用于密度研究。高度过滤器还可用于定位表面下方的点,这可能在 LIDAR 数据的 QA/QC 中是有用的。这对于建筑物、植被和其他地面特征的分类也很有用。 | |
| Intensity from RGB ( RGB 生成强度) | 标准版 无人机版 | v2014.1 | 根据点的 RGB 值填充强度值 |
| LAS Affine Transform (重命名) (LAS 仿射变换) | 高级版 无人机版 | v2019.2.38 | 在 v2019.2.38 中引入,后来重命名为 Affine Transform LAS(见上文) |
| Low/Isolated Points (低点/孤立点) | 高级版 无人机版 | v2011.1 | 根据噪声点是否显着降低或与其邻近点隔离度对噪声点进行分类。 |
| Macro (宏) | 标准版 无人机版 | 按顺序执行多个任务集合 | |
| Merge Point Cloud (合并点云) | 标准版 无人机版 | v2020.2.22 | 用于合并两个 LAS 图层。对于合并来自不同传感器的数据非常有用,例如 True View 3DIS 数据集和测深数据。 |
| Model Key Points (模型关键点) | 高级版 True View EVO | v2012.1 | 查找模型关键点: 如果您考虑 DEM 中的所有点,并且对于每个点,删除该点并查看表面发生的偏差量,则可以最好地总结模型关键点点云任务。如果该偏差超过了您设置的限制,则该点被视为模型关键点并相应地标记,因为如果不使用该点,曲面与原始曲面的偏差将超过允许的公差。 |
| Planar Point Filter (Building Filter) (平面点过滤器)(建筑物过滤器) | 高级版 True View EVO | 用于自动对点云中的平面进行分类。它最常用于检测建筑物屋顶,但也可用于任何平面检测。 | |
| Planar Statistics (平面统计) | 基础版 无人机版 | v2015.1 | 计算给定平面的平面统计数据并将它们作为属性输出到shp文件中的形状。它定义最佳拟合平面并计算拟合值的质量,这些值作为属性存储在形状文件中。它还可以用作诊断工具,以方便平面滤波器设置的设置。 |
| Point Cloud Statistics Extractor (点云统计提取器) | 基础版 无人机版 | 将点云统计数据提取到地理或文本文件中。在LiDAR数据的 QA/QC 过程中,统计数据在以有效方式评估 LIDAR 数据方面发挥着重要作用。可以为整个 LIDAR 项目数据集、数据集中的每个文件甚至项目中的指定区域计算统计数据。 | |
| Point Group Tracing and Squaring (Extractor) 点群追踪和直角化(提取器) | 高级版 True View EVO | 点组跟踪和直角化点云任务将允许您进一步细化分类为建筑物的点云数据,并将建筑物轮廓提取到 shapefile 中。 | |
| Powerlines Extractor (电力线提取器) | 高级版 True View EVO | v2020.2.10 | 从点云中提取电力线悬链线,并提供对点进行分类和对悬链线进行矢量化的选项。 |
| Proximity Classifier (临近分类器) | 标准版 无人机版 | v2020.1 | 邻近分类器点云任务根据邻近点的属性对点进行分类。用于以下一些场景: 1、针对来自多个采集时间的数据集,根据旧数据集对新数据集进行分类。 2、对较大数据集的子集进行分类,然后将子集的分类合并回原始数据集中。 3、根据与另一个分类特征的接近程度来查找分类特征。 |
| Rail Extractor (铁路提取器) | 高级版 无人机版 | v2014.1 | 提取铁路点和铁路中心线。 该点云任务自动提取轨道对齐(中心线)矢量以及对“轨道顶部点云”进行分类。此功能作为半自动点云任务 (PCT) 实现,轨道对齐/点提取需要相对高密度的激光雷达数据。我们在每平方米 40 点方面取得了一些成功,但建议在 80 点/平方米左右。 |
| Reproject LAS (重新投影 LAS) | 高级版 无人机版 | v2019.2.38 | 此工作流程适用于 LAS 数据重新投影,或在 x、y 和/或 z 方向上的移动或缩放。可以用于以下转换: 1、地理空间参考系统到投影坐标系的相互转换。 2、从一个投影坐标系到另一个投影坐标系的转换 3、不同的测量单位之间转换 4、从 LAS 数据中去除垂直偏差 |
| Reproject Raster (重新投影栅格) | 标准版 无人机版 | v2018.1 | 此任务将栅格图层从一个坐标系重新投影到另一个坐标系。 该任务可以重新投影栅格图层、创建金字塔和 JPEG 压缩。 |
| Reproject/Shift/Scale LAS (已弃用) 重新投影/移位/缩放 LAS | 标准版 无人机版 | v2017.2 | 此任务将 LAS 点从一个 SRS 转换为另一个,并可选择平移或缩放坐标。 (在 v2019.2.38 中被 Reproject LAS 和 LAS Affine Transform 替换) |
| Smoothing Point Cloud (平滑点云) | 高级版 无人机版 | v2020.1 | 点云数据平滑 与来自 Riegl 的高端测量级 LIDAR 相比,使用“汽车级”激光扫描仪的无人机 LIDAR 系统会产生“噪声”。这种噪声现象的一部分是由紧密的点间距(Nominal Point Spacing 或 NPS)引起的错觉。相距较近的点之间的微小高程差异比稀疏间隔点的相同高程差异更明显(并且令人反感)。也就是说,这些扫描仪比测量等级系统噪音更大。 |
| Smoothing-Respacing | 标准版 无人机版 | v2014.1 | 在给定几何体上执行顶点的平滑和重新调整间距 |
| Statistical Noise Point Filter (统计噪声点滤波器) | 高级版 无人机版 | v2011.1 | 根据描述性统计对噪声点进行分类 |
| Toe Extractor (坡脚提取器) | 高级版 无人机版 | v2015.1 | 该任务将自动将干净库存的坡脚数字化,并允许对高架结构(例如输送带)进行分类。在计算库存体积时,此工具可节省大量时间。 |
| Volumetric Analysis (体积分析) | 标准版 无人机版 | v2013.2 | 计算体积并可选择创建差异 LAS 数据集 |
